これがまたメチャクチャ楽しくてしかたがない.
某社でいま話題の次世代光ディスクドライブの量産立上げのお手伝いをさせていただいたのですが,やはり最先端の物に触れることができるというのはすばらしく刺激的.
日頃からニュースで騒がれている製品に少しなりとも関われるというのはとてもやり甲斐を感じますね.
久しぶりの人生全力投球で,もはや大学生の中で光ディスクの知識において僕に勝てる人間がいるのだろうか!というくらい勉強させていただきましたともw
その他基礎的な所にしても幾何光学,波動工学,電磁気学,光測定技術,半導体レーザ,干渉縞の数値解析,スペクトル解析,統計学など,俺の苦手な分野ばかりが出てきたので本当勉強になりましたね.いったい何冊本を読んだんだろうかって感じ.期間は2ヶ月弱でしたけど大学の一年間分は勉強になりました.
大昔に某重工で軍用ヘリの全バラ整備をしてたときと同じくらいに面白かったです.
重厚長大産業と家電という,まったく異なる業種ってところがまたよい対比になっていい感じですし.
今後の就職の参考にさせていただきます.某社の皆様,本当にありがとうございました.
ところで,
友人に誘われて豊田クリエイティブというロボコン大会に出場してきました.
愛知県の人だったらケーブルテレビかなにかで僕らの活躍が見れるはずなのでお暇を弄ばしている方はチェックしてくださいまし.

これがまた意外に豪華な大会で賞金額が半端じゃないことと運営とルールがおおらかというか,神経質でないというか,まぁ,アレなことで有名らしい.
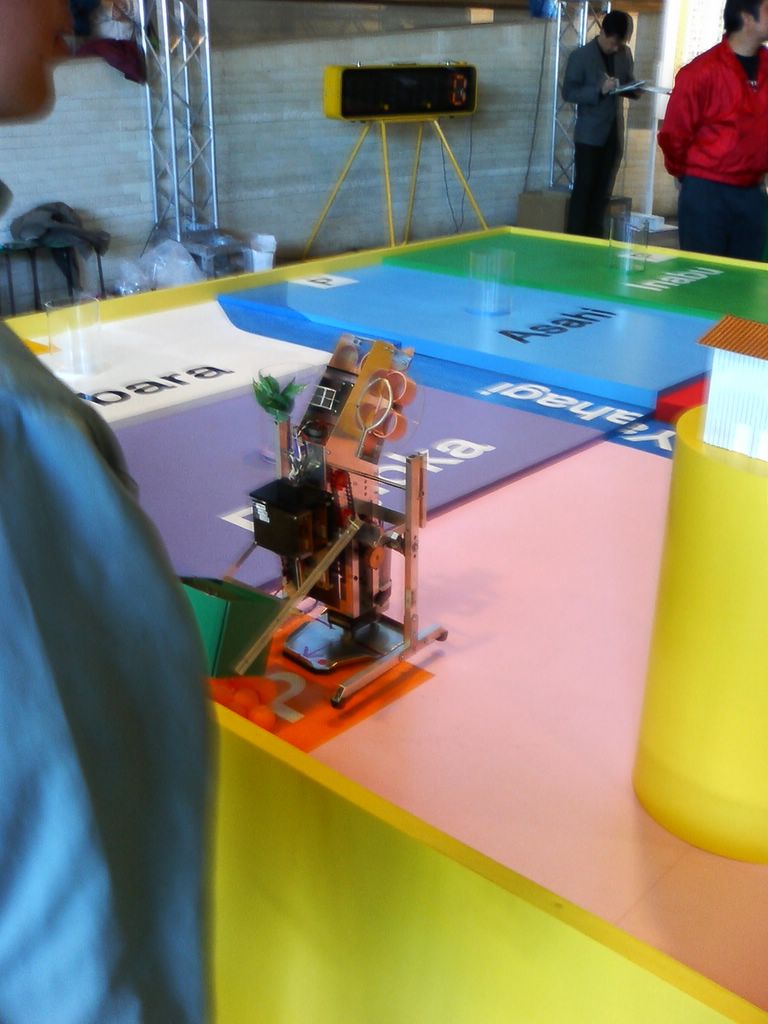
こんな感じのマシンを一週間で作り上げ

まぁまぁの得点をゲットしてMCのおねえさんに問い詰められてキョドる俺.
まさかリーダーでも操縦者でもない下っ端の俺に振られるとは思いもしませんでしたよ.

そしてまさかの準優勝.賞金十万円コレキタ
まー他のチームがプラスチックダンボールで組んだフレームにタミヤのギアボックスとマブチモータをくくりつけてそれを有線でドライブしていたのに対し,僕らはジュラルミンフレームに産業用サーボモータを組み込んでそれをマイコン使ってPWM駆動して,尚且つ無線だからなw 大人気無いと皆に罵倒されましたw
でも上位のチームはさすがに凄かったですね.
優勝した豊田高専のチームなんざ足にセンサ付けてなんか制御してたっぽいし.すばらしい.


左:正面 右:側面

背面
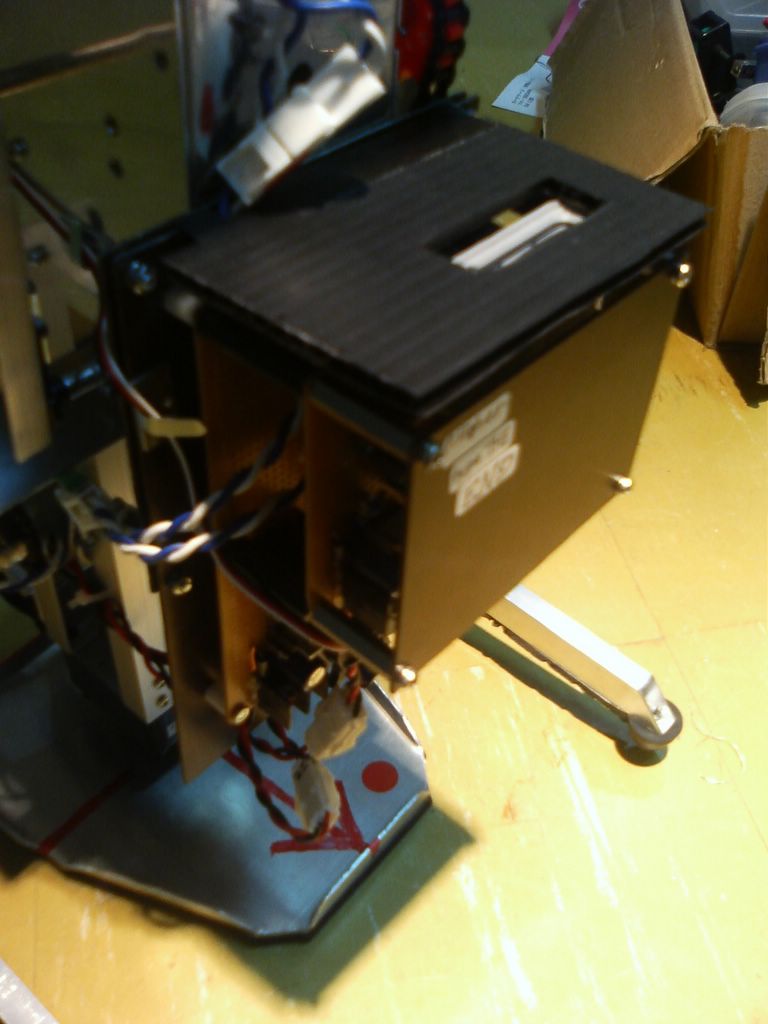
電装&マイコン担当のsahakiお手製のマイコン回路.
上に見えるプレステコントローラコネクタにプレステのコントローラを刺せばロボを自在に操縦できます.
ロボコン&マイコン野郎にとってプレステコントローラのハッキングは基本の一つなのではないだろうか.
俺も数年前にちょっとだけ勉強したけど速攻挫折したね.むずかし杉.
それを彼はプレステコントローラ通信用マイコンとモータ駆動用マイコンをシリアル通信で繋げるという高度なシステムを一週間で構築に成功してしまったのですよ,機械野郎なのに!!
モータ駆動つっても単なるON-OFFじゃなくてRCサーボとPWM駆動できるポートを数チャンネルづつ用意してくれましたからねぇ.これによってかなりの戦闘力を引き出してもらいました.
いい仕事していますねぇ~

こちらはマシンの上部にある得点機構.設計製作を担当されたのはAgrewさんです.
超高精度な美しいアルミモノコックボディーは見るものを魅了してなりません.
こだわりの職人技のなせる業.まったく恐れ入ります.
リボルバーみたいになっている理由はただ単に「カッコよさげ」だから.

オーソドックスにジュラルミンのアングルをくみ上げて作られた足回りの担当が私.
基本ホームセンターにある材料だけで構成されていますが歯車,ベアリングなどの機械要素は大須で買ってきてもらったりRSコンポーネンツで買ったりしました.
仕様としては三足歩行ができること,超信地旋回可能な事,25mmの段差を乗り降りできることなどが要求されていましたが,これらは数回足の形状を作り直すことにより見事クリアすることができました.
三足歩行を採用した理由は「カッコよさげ」だから.あくまでマイノリティーを追求する姿勢が大事です.
性能なんて2の次でいいんですよw
また,思わぬ収穫として重心位置があまりにもエレガントに中心に位置していたため,超信地旋回を利用してブレイクダンスを舞うことができます!?
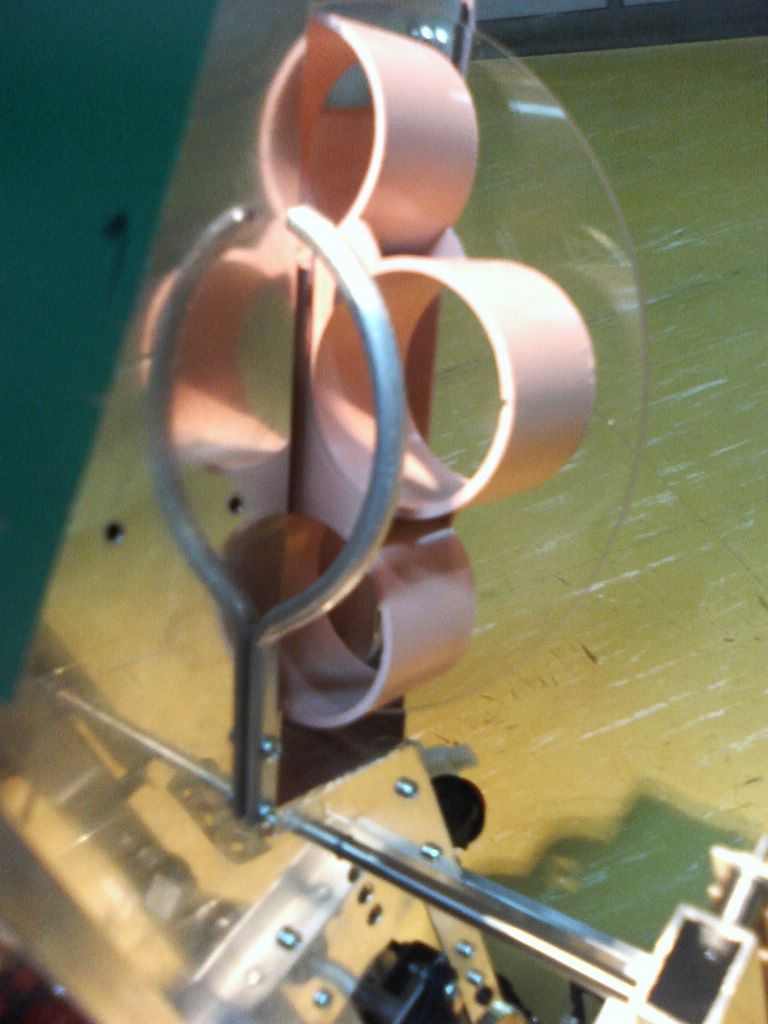
俺のこだわりの一品:弧を描くボールのガイド
アルミパイプを手と万力を使って曲げて作りました.
パイプベンダーが欲しい・・・,
操縦に熟練を要求するにも関わらず,長時間運転すると振動で壊れていくので満足に練習できないという致命的な欠陥がありました.
無いものねだりとしては,あと一週間くらい時間があったら制御を入れてハードウエアを仮想化したかったねぇ.あーでもSHでも持ってこない限りリソースが足り無さ過ぎるに違いないw
僕ら3人としては結果にもマシンの出来にも大満足でした.
次なるチャレンジは「2週間の練習で人間はフルマラソンを完走できるのか?」です.
かなり絶望的ですがお楽しみに.